Ethan Chun
Hello! Welcome to my project page! I am a Research Engineer at Meta working on machine learning for humanoid robots. Prior to this, I was a master's student at MIT with Sang-bae Kim's Biomimetic Robotics Group, working on robotic manipulation involving 3D perception and tactile sensing. During this time, I also interned with the Optimus team at Tesla where I worked on learning-based navigation. I have previously worked with Leslie Kaelbling and Tomas Lozano-Perez's Learning and Intelligent Systems Group and Hugh Herr's Biomechatronics Group.
This section is rather out of date... I am particularly interested in the intersection of Robotics and Machine Learning with a focus on 3D perception systems for robotic manipulation.* I believe that developing robust manipulation and perception systems is key to enabling robots to prosper in the real world. Some recent projects include my work on Local Neural Descriptor Fields, presented at ICRA 2023, and my work on 6-Dof Approach Planning with Reflexive Grasp Execution, submitted to ICRA 2024. On my free time, I enjoy making random things, dumpster diving, biking, and exploring my school's campus.
My resume can also be found here in case anyone is curious. You can contact me at ethan.l.chun [at] gmail [dot] com and my LinkedIn is linkedin.com/in/elchun. Otherwise, enjoy the projects!
*Recent experience has taught me that perhaps there is a deeper issue than perception. If we want robotic agents to exist in the real world, then it seems that we should be designing models to operate continuously and integrate information over time. I am therefore investigating a change of focus toward neuroscience inspired AI with a focus on memory systems, adaptation, and recurrent architectures.
Industry Projects

Tesla AI, Visual-Language Navigation
I interned with the Optimus team at Tesla during the spring of 2025. During this time, I worked on two super fun projects related to navigation on Optimus. While I can't speak much about them, one of my projects is clearly shown in this tweet by Marc Benioff during a demo with Elon Musk. Specifically, I, along with my direct mentor, designed the system that allows Optimus to know where in the office to go grab a Coke. You can use your imagination to figure out what else my projects could do. I had a lot of fun working with the team at Tesla and learned a ton too!
Publications
Local Neural Descriptor Fields: Locally Conditioned Object Representations for Manipulation
Ethan Chun, Yilun Du, Anthony Simeonov, Tomas Lozano-Perez, Leslie Kaelbling
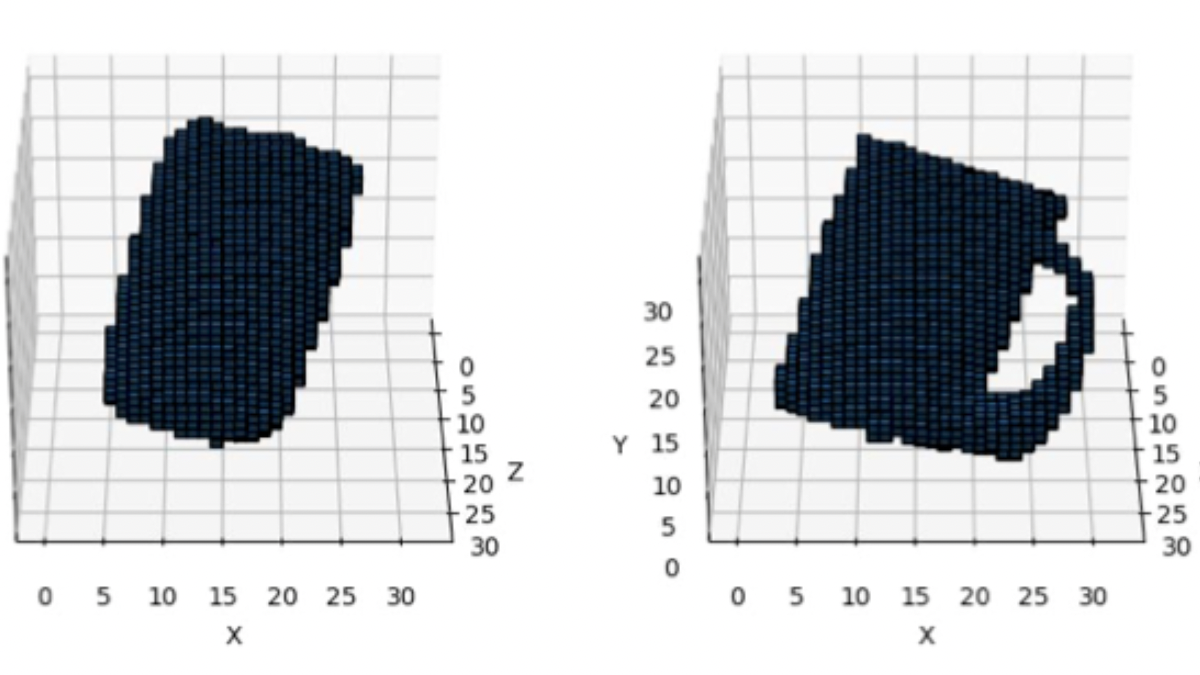
Neural Descriptor Fields are a way to implicitly represent three dimensional geometry in a neural network. Similarly shaped objects produce similar descriptor fields, thus one can use Neural Descriptor Fields to encode object poses. Unfortunately, conventional Neural Descriptor Fields encode information at the object level -- a handle on a mug is treated differently than if that handle were glued to a bottle. In this paper, we present an architecture which restrict Neural Descriptors to local geometry, allowing for more varied robotic manipulation.

Tissue-integrated bionic knee restores versatile legged movement after amputation
Tony Shu, Daniel Levine, Seong Ho Yeon, Ethan Chun, Christopher C. Shallal, John McCullough, Rickard Brånemark, Matthew J. Carty, Marco Ferrone, Sean Boerhout, Alexander Ko, Corey L. Sullivan, Gloria Zhu, Michael Nawrot, Matthew Carney, Ged Wieschhoff, Gabriel Friedman, and Hugh Herr
This was a much more extensive followup to the below paper which we
ultimately published in Science. I was mostly involved in the
hardware and data collection since this worked used an upgraded
version of the one mentioned below.
Paper: [link]
MIT News article: [link]
Modulation of Prosthetic Ankle Plantarflexion Through Direct Myoelectric Control of a Subject-Optimized Neuromuscular Model
Tony Shu, Christopher Shallal, Ethan Chun, Aashini Shah, Angel Bu, Daniel Levine, Seong Ho Yeon, Matthew Carney, Hyungeun Song, Tsung-Han Hsieh, and Hugh M. Herr
The focus of this paper is on a novel EMG control paradigm using a Neuromuscular model of trans-tibial amputee subject. However, in order to test this paradigm, we also needed a fully function robotic ankle -- hence my role. While Tony and Chris focused on the controls aspect, I worked on sensor integration, mechanical system upgrades, new firmware to accommodate the EMG board, and various other mechatronics related tasks. It's a lot of fun building robots!
Technical Projects
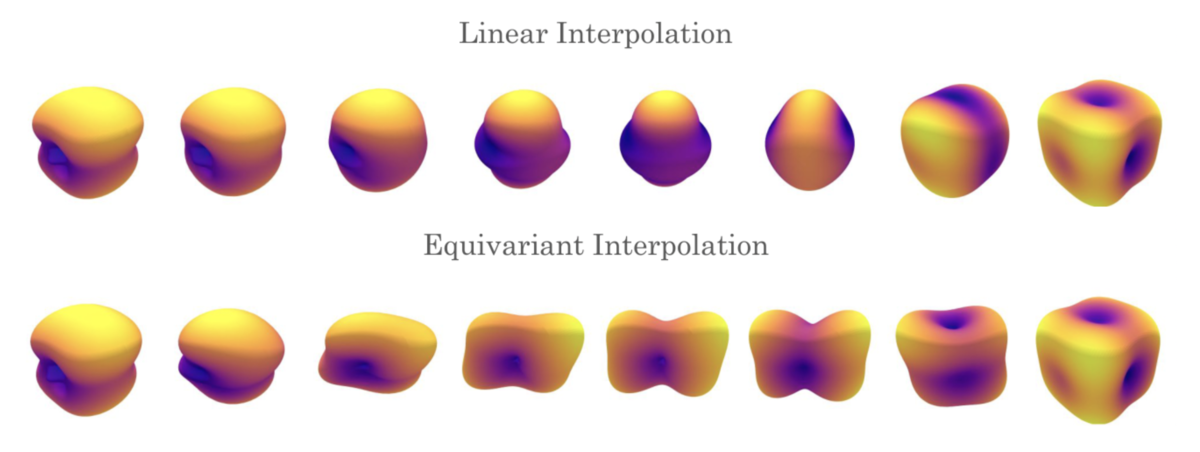
Novel Shape Generation with SO(3)-Equivariant Auto-Encoders
This is my final project for Prof. Tess Smidt's course on Equivariant Neural Networks. The main idea is that we wanted to find a more efficient way to generate 3D shapes. To do so, we leverage the inherent SO(3) symmetry in 3D data and propose an SO(3) equivariant auto-encoding neural network. We represent 3D shapes as the coefficients of the spherical harmonic basis functions and design a rotation equivariant interpolation method to traverse the latent space. We demonstrate robust reconstruction of a dataset of 100 randomly generated boxes and show coherent traversals of the latent space when trained on two and 100 randomly selected objects.
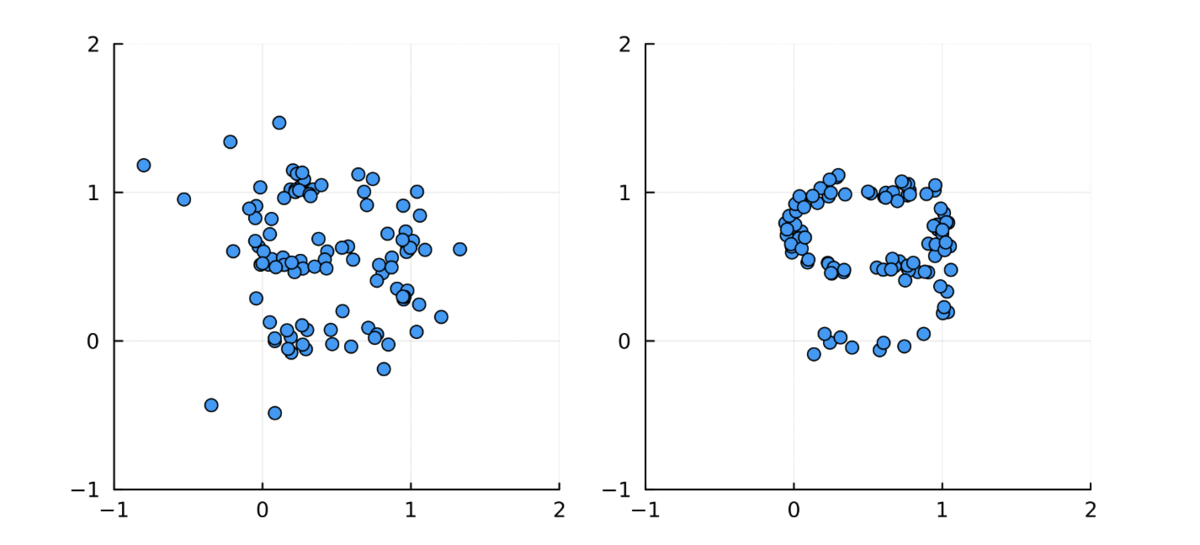
Understanding Probabilistic Inverse Graphics through Optical Digit Recognition with 2D Gaussians
This is my final project for Prof. Josh Tenenbaum's course on Computational Cognitive Science. I wanted to make a simple demonstration of probabilistic inverse graphics. To do so, I targeted optical digit recognition, one of the simplest inverse graphics problems known. I modeled each digit as a collection of 2D Gaussians and ran inference on noisy point set images. I demonstrated a success rate of 0.95 over 50 trials per digit. Furthermore, I presented two of my past attempts at this problem and provided intuitive reasoning on their strengths and pitfalls.
Tiny View Conditioned Latent Diffusion Models
View conditioned latent diffusion models show great potential to improve scene understanding in robotics applications. However, training times are slow and while the former focuses on image quality, robotic applications prioritize efficiency. To fix this, we present a scaled down version of the popular Latent Diffusion Model, trained on the SRNCars dataset. Inspired by the work, Zero-1-to-3, we provide image and pose conditioning conditioning to allow for novel view synthesis from single images. Our model reduces the number of trainable parameters from 860 million in state of the art models to less than 1.7 million parameters and trains in less than four hours on a consumer GPU. This was my final project for Vincent Sitzmann's Inverse Graphics seminar at MIT.
Stereo Occupancy Networks
Current 3D neural implicit reconstruction algorithms often use single images or point clouds as input data. However, the noise artifacts or lack of information from these data can degrade the robustness of their implicit representations. What if we leverage recent advances in stereo perception and use stereo images as input data? Click here to find out more! This was my final project for MIT's Computer Vision course (6.8301).
catBot: Solving the Falling Cat Problem
Have you ever seen a cat fall? They always land on their feet! How is this possible? Is it magic? This is the problem I explore in a set of papers on the falling cat problem. In the first paper, I explore the use of trajectory optimization to solve mimic the cat's motion. In the second, I test two Reinforcement Learning Algorithms, Soft Actor Critic and Proximal Policy Optimization, and compare their performance on solving the problem. Read on to learn how cats always land on their feet. Spoilers: it's not magic!
ChessBot: A Single View Perception and Manipulation System for Robotic Chess
Now presenting, a robot playing chess! Using a single RGBD sensor, this robot system can perceive and act on the state of a 3d simulated chess board. Winning a 2022 Outstanding Project Award, this is my final project for MIT's course on robotic manipulation.
Mechatronics Upgrades to the TF8 Powered Prosthetic Knee
Over the past year, I've been working with Tony Shu to upgrade and refine the TF8 actuator system for use as a powered prosthetic knee. On my part, this involved various custom designed hardware, included a new endstop system and electronics mounts.
A Single-board Mechatronics Platform for Control of a Powered Prosthesis
During my early time at Biomechatronics, I worked extensively with Dan Levine and Tony Shu to develop a new Prosthesis Controller. This system, dubbed Talaria Verdin, enables much of the complex movement seen in the Biomechatronics publication above and is currently in use on three powered prosthesis systems.
Random Projects
Bird Lamp
I made this bird lamp for a friend's birthday. It's designed after the small birds hopping around MIT's campus. The shell was resin printed and the lights are controlled by a small arduino-like microcontroller.

Maker Portfolio
This is a collection of images and descriptions from the maker portfolio that I used to apply to MIT. I haven't edited it too much but its a good overview of some of my previous projects